#include <SoftwareSerial.h>
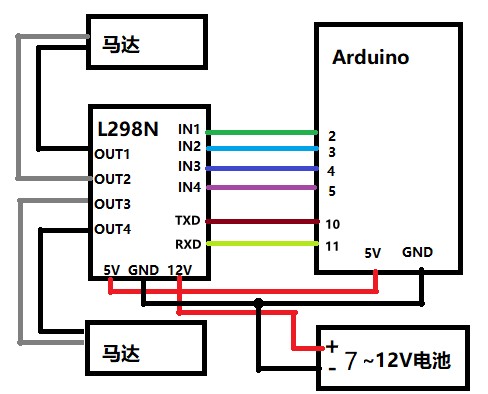
// Pin10 BT
// Pin11 BT
SoftwareSerial BT(10, 11);
char val;
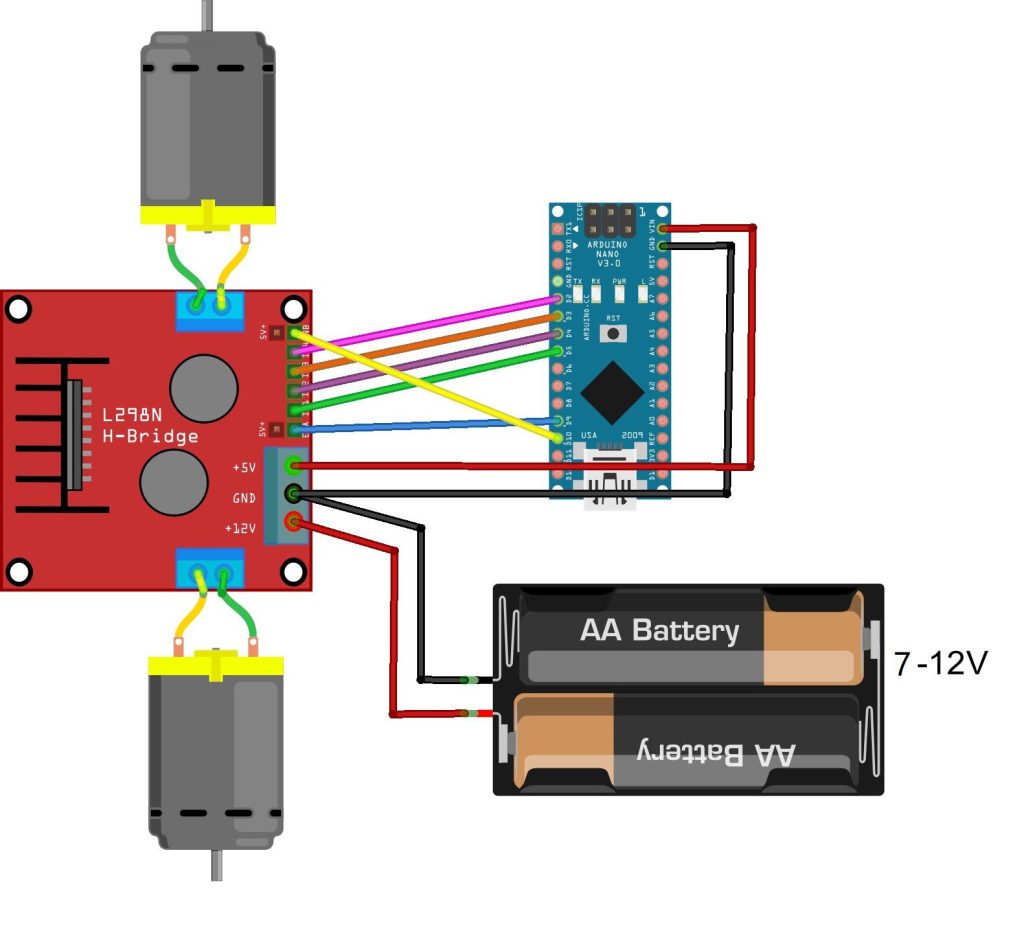
int in1 = 2;
int in2 = 3;
int in3 = 4;
int in4 = 5;
void setup() {
// put your setup code here, to run once:
pinMode(in1,OUTPUT);
pinMode(in2,OUTPUT);
pinMode(in3,OUTPUT);
pinMode(in4,OUTPUT);
Serial.begin(38400);
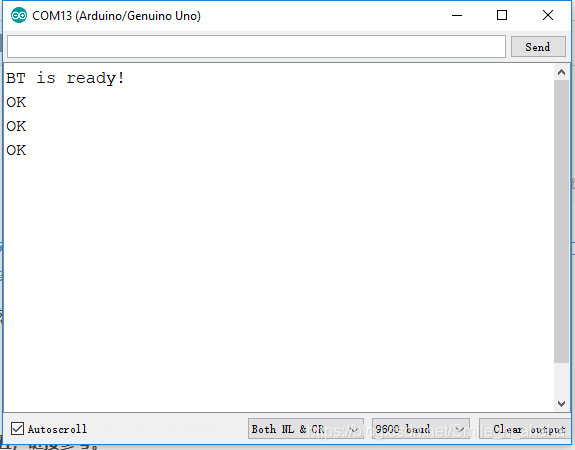
Serial.println("bluetooth is ready!");
BT.begin(38400);
}
void loop() {
if (Serial.available()) {
val = Serial.read();
BT.print(val);}
if(val == 'f')
{//forward 向前转
go();}
if(val == 'b')
{ //stop 停止
back();}
if(val == 'l')
{ //forward 向左转
go_left();}
if(val == 'r')
{ //back 向右转
go_right();}
if(val == 's')
{ //stop
car_stop();}
val=0;
if (BT.available()) {
val = BT.read();
Serial.print(val);
}
}
void car_stop()
{
digitalWrite(in1,LOW);
digitalWrite(in2,LOW);
digitalWrite(in3,LOW);
digitalWrite(in4,LOW);
// delay(1000);
}
void go()
{
digitalWrite(in1,HIGH);
digitalWrite(in2,LOW);
digitalWrite(in3,LOW);
digitalWrite(in4,HIGH);
delay(1000);
Serial.print("Forward!!");
}
void back()
{
digitalWrite(in1,LOW);
digitalWrite(in2,HIGH);
digitalWrite(in3,HIGH);
digitalWrite(in4,LOW);
delay(1000);
Serial.print("Forward!!");
}
void go_left()
{
digitalWrite(in1,HIGH);
analogWrite(in2,LOW);
digitalWrite(in3,LOW);
digitalWrite(in4,LOW);
delay(1000);
Serial.print("Left");
}
void go_right()
{
digitalWrite(in1,LOW);
digitalWrite(in2,LOW);
digitalWrite(in3,HIGH);
analogWrite(in4,LOW);
delay(1000);
Serial.print("Right");
}